


We wanted Alejandro to have a power wheelchair. We wanted him to be able to move through the world by his own volition and it’s clear that the ability to independently explore his environment is important for his cognitive development on multiple levels. We tried going through the typical process of obtaining a power wheelchair but met numerous obstacles:
- A new power wheelchair was much too expensive for our family to purchase out of pocket.
- Blue Cross Blue Shield of Illinois wouldn’t pay for one because they already paid for a medical stroller when Alejandro was 9 months old. We were told that we needed to wait 5 years. This was much too long to wait, especially during these early years which are so important developmentally.
- Recent cuts to the Illinois Medicaid program have made it very difficult to obtain funding for such devices.
- Alejandro is very weak and it was difficult to find an off the shelf access method that he could use. While there are a number of sensitive switches, joysticks and sensors available none of them seemed feasible as they all required a precise and delicate positioning that would be lost the moment his wheelchair hit a bump. Furthermore, finding this positional sweet spot took too much time for practical use.
Our best option was to for me to try to build something myself.
While looking for motors and wheels on Ebay I stumbled across a used adult Invacare TDX3 with MK5 electronics for relatively cheap ($800, shipping included, batteries not). I decided that starting with this was a signifiant head start on the project and was well worth the money. I purchased the wheelchair with the intention of using the motorized base and controller and then add new seating and a customized access method. I also purchased a wheelchair programmer, a device that allows you to configure and modify the wheelchair’s internal drive and control parameters.

Seating
The chair from Alejandro’s EasyS stroller fits him well and provides decent support as well as being reclinable and adjustable. It can detach from the stroller base and attach to a ‘Hi-Lo’ base for use around the house and it also allows you to attach a tray.
I fabricated a mating piece to be fixed to the power wheelchair base, allowing the EasyS chair to clip into it the same way it clips into the stroller base or the Hi-Lo base. Below is a photo of the piece that I built from plywood which is sturdy and adequate although at some point I’ll have someone weld up a metal version now that I have a working prototype.

Due to the adjustable and reclinable nature of the EasyS there are two sliding extruded aluminum rails that extend below and behind the seat. They protrude the most when the chair is in an upright position, which is necessary for driving. I was able to acquire a pair of shorter versions of this piece which allowed me to get the entire seat assembly as low and small as possible. I wanted the seat to be low for stability and also because I want my kid to move through the world at a height which is typical for people his age.
MK5 Interface
None of the available methods that I investigated seemed to be feasible for Alejandro to be able to consistently and reliably control a wheelchair. It was pretty clear that I’d have to come up with something myself and I would somehow have to interface this with the wheelchair electronics in order to drive it. The Invacare MK5 electronics communicate with the user controls via a proprietary serial protocol. Other’s have tried to hack this without success and I really don’t have time to try my hand at it so I decided to find a more simple route.
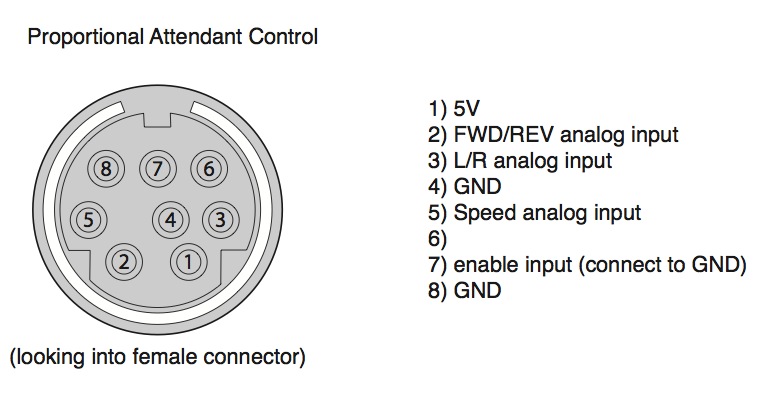
I originally purchased a 1554M5 Sip & Puff interface on Ebay which connects the the MK5 electronics. The 1554M5 has a mini-DIN connector for a Proportional Attendant Control and also a DB9 connector for switch inputs. The DB9 connector pinout is documented and has inputs for forward, reverse, left and right. I tested this by connecting some pushbuttons but was disappointed with its functionality. Pressing the forward button moves the chair forward at the programmed speed and pressing the left button rotates the chair in place as well. Unfortunately pressing the forward and left buttons simultaneously moves the chair in the expected direction, but at a speed which seems to be the sum of the programmed forward and turning speeds. This is a speed which is greater than both the forward and turning speeds resulting in a somewhat jerky operation when switching headings. I played with the drive parameters for quite awhile but was never able to get any reasonably smooth transition from forward to a turn. Besides this I really wanted Alejandro to have a proportional control if at all possible.
The pinout for the Proportional Attendant Control is not published but I was able to figure it out by poking around and making some educated guesses based on the documented functionality and by following circuit board traces. There are three analog inputs for X/Y and an overall speed control, as well as a switch input to override the user control and enable the attendant control. Unfortunately the the MK5 electronics do not allow you to provide drive profile settings for the attendant control. There are no adjustments for acceleration, braking, torque etc., these are all set at some pre-programmed values. I wanted to be able to program different drive profiles for indoor, outdoor, learning etc., so my search continued.
What I finally settled on was a modified Invacare 1812 Joystick. The 1812 is a proportional (analog) joystick which connects to the MK5 electronics and can be assigned to the drive profile(s) of your choice. The 1812 contains an analog joystick and a round circuit board which me